
Основные отличия двух типов биполярных транзисторов
Главным различием между ними считается то, что дырки являются основными носителями тока для транзисторов PNP, NPN-транзисторы имеют в этом качестве электроны. Поэтому полярности напряжений, питающих транзистор, меняются на обратные, а его входной ток вытекает из базы. В отличие от этого, у NPN-транзистора ток базы втекает в нее, как показано ниже на схеме включения приборов обоих типов с общей базой и общим эмиттером.
Принцип работы транзистора PNP-типа основан на использовании небольшого (как и у NPN-типа) базового тока и отрицательного (в отличие от NPN-типа) базового напряжения смещения для управления гораздо большим эмиттерно-коллекторным током. Другими словами, для транзистора PNP эмиттер является более положительным по отношению к базе, а также по отношению к коллектору.
Способ подключения
Вариант подключения любого бесконтактного датчика зависит от примененной в процессе его производства схемы построения.
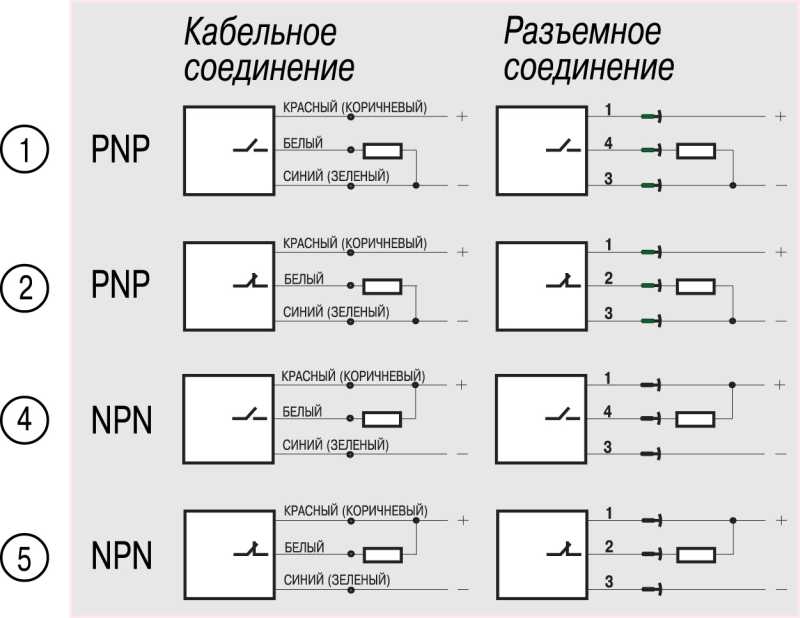
Трехпроводные
Трехпроводные имеют 3 проводника, 2 из которых предназначаются для обеспечения устройства питанием, а третий применяется для подключения к нагрузке. Она, в зависимости от использованной при разработке структуры, может подсоединяться к аноду либо катоду источника напряжения электрического тока.
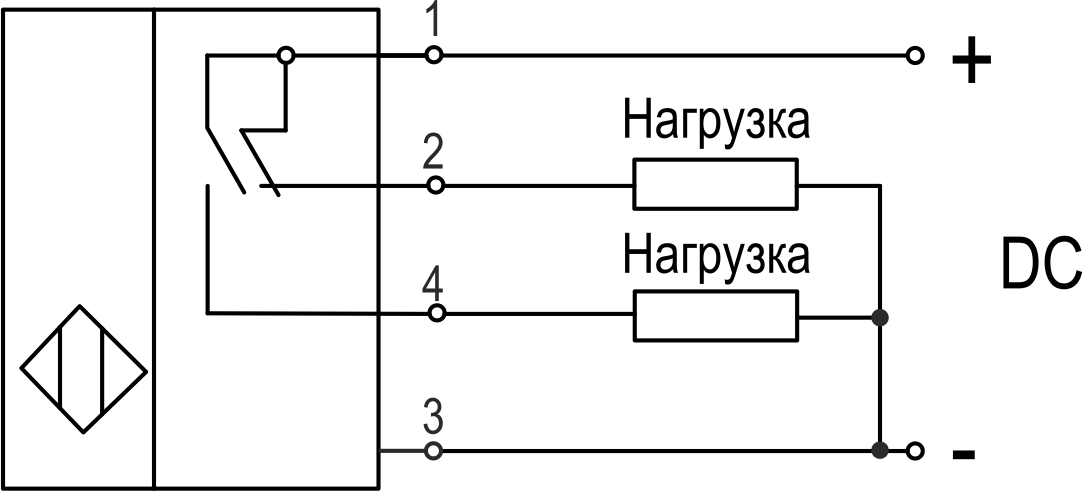
Четырехпроводные
Четырехпроводные индукционные датчики отличаются наличием четырех проводников: 2 провода идут на питание, а другие 2 — на загрузку.
Двухпроводные
Двухпроводные устройства подключаются прямо в нагрузочную цепь. Это самый элементарный вариант, но и он обладает отдельными особенностями. Данный способ для нагрузки требует номинальное сопротивление, если же его значение окажется больше или меньше, тогда индукционный датчик не сможет корректно работать.
Пятипроводные
Пятипроводной отличается от четырехпроводного только наличием пятого проводника, который позволяет выбирать режим работы устройства.
Устройство биполярного транзистора
https://youtube.com/watch?v=iqraL2VcOjw
Элемент назвали биполярным, потому что в его работе принимают участие сразу 2 типа зарядных носителей – электроны (устойчивые отрицательно заряженные элементарные частицы) и дырки (квазичастицы с положительным зарядом). Работа ранее разработанного униполярного (полевого) устройства основана на применении лишь одного из носителей. Прибор имеет 3 слоя, на каждый из которых подается напряжение:
- эмиттер;
- база (базовая плата, пластина);
- коллектор.
![]()
Negative — это кремниевый сплав. Он обладает избытком отрицательных переносчиков заряда — электронов (n-doped), а positive — избытком положительных «дырок» (p-doped).
База очень тонкая, представлена слаболегированным полупроводником, поэтому она имеет сильное сопротивление. Коллектор, как правило, шире эмиттера. Поэтому общая площадь соединения база-коллектор значительно превышает комплекс база-эмиттер. Менять местами эти 2 области за счет изменения полярности нельзя. Транзистор не относится к симметричным элементам — это необходимо для его правильной работы.
Транзисторные пары в схемах управления электродвигателями
Их применяют также в H-мостовых цепях управления реверсивными двигателями постоянного тока, позволяющих регулировать ток через двигатель равномерно в обоих направлениях его вращения.
H-мостовая цепь выше называется так потому, что базовая конфигурация ее четырех переключателей на транзисторах напоминает букву «H» с двигателем, расположенным на поперечной линии. Транзисторный H-мост, вероятно, является одним из наиболее часто используемых типов схемы управления реверсивным двигателем постоянного тока. Он использует «взаимодополняющие» пары транзисторов NPN- и PNP-типов в каждой ветви, работающих в качестве ключей при управлении двигателем.
![]()
Вход управления A обеспечивает работу мотора в одном направлении, в то время как вход B используется для обратного вращения.
Например, когда транзистор TR1 включен, а TR2 выключен, вход A подключен к напряжению питания (+ Vcc), и если транзистор TR3 выключен, а TR4 включен, то вход B подключен к 0 вольт (GND). Поэтому двигатель будет вращаться в одном направлении, соответствующем положительному потенциалу входа A и отрицательному входа B.
Если состояния ключей изменить так, чтобы TR1 был выключен, TR2 включен, TR3 включен, а TR4 выключен, ток двигателя будет протекать в противоположном направлении, что повлечет его реверсирование.
Используя противоположные уровни логической «1» или «0» на входах A и B, можно управлять направлением вращения мотора.
Реальные датчики
Датчики купить проблематично, товар специфический, и в магазинах электрики такие не продают. Как вариант, их можно купить в Китае, на АлиЭкспрессе.

А вот какие оптические датчики я встречаю в своей работе.
Вариант №1: воспользоваться специальным преобразователем, например устройством согласования сигналов УСМ, которое представлено у нас в ассортименте, или аналогичным.
Вариант №2: если вы хотя бы минимально дружите с паяльником, сделать преобразователь самому.
Если в наличии есть датчик с PNP выходом, а нужен NPN — собираем вот такую схему:
![]()
Транзистор Q1 — любой подходящий NPN, например 2SC495, BC445, BD237.
Если же в наличии имеется датчик с NPN выходом, а нужен PNP — такую схему:
![]()
Транзистор Q1 — любой подходящий PNP, например 2N5401, КТ502Д.
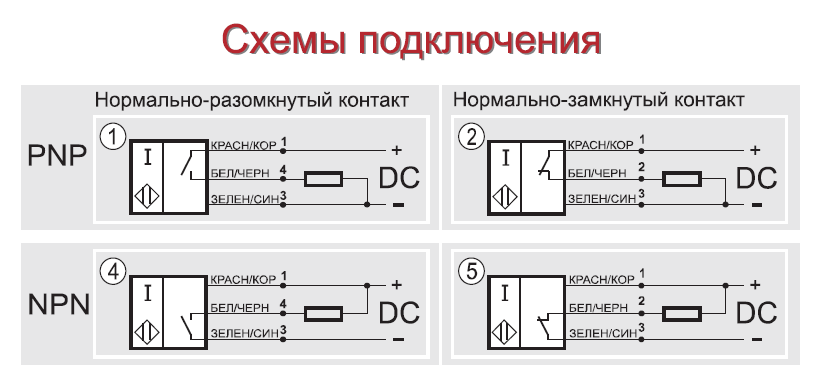
Схемы подключения датчиков PNP и NPN
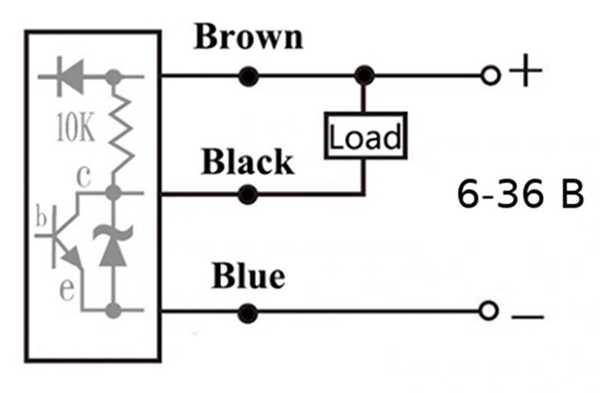
Отличие PNP и NPN датчиков в том, что они коммутируют разные полюсы источника питания. PNP (от слова “Positive”) коммутирует положительный выход источника питания, NPN – отрицательный.
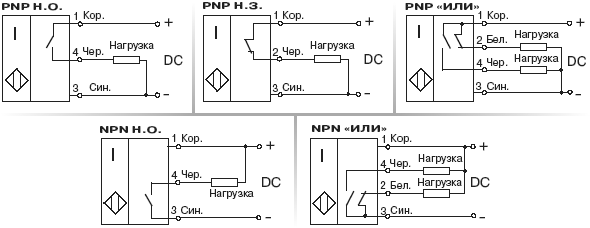
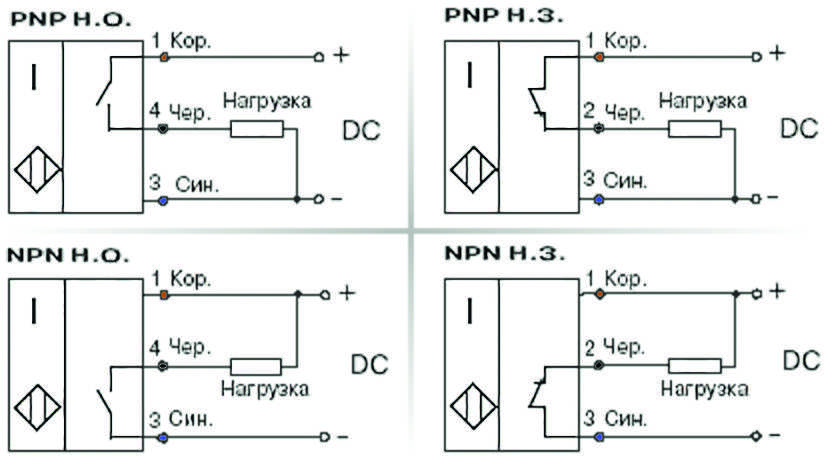
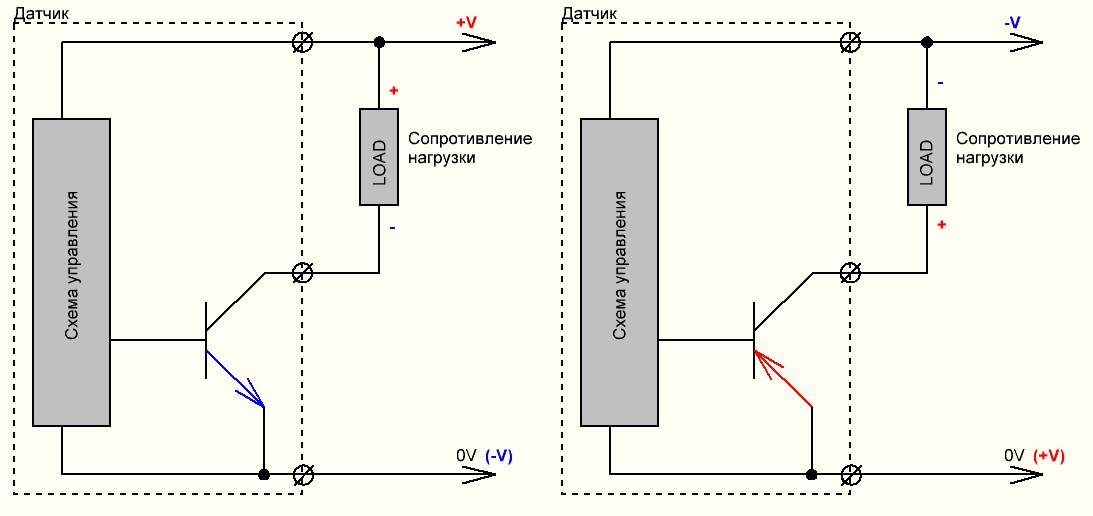
Ниже для примера даны схемы подключения датчиков с транзисторным выходом. Нагрузка – как правило, это вход контроллера.
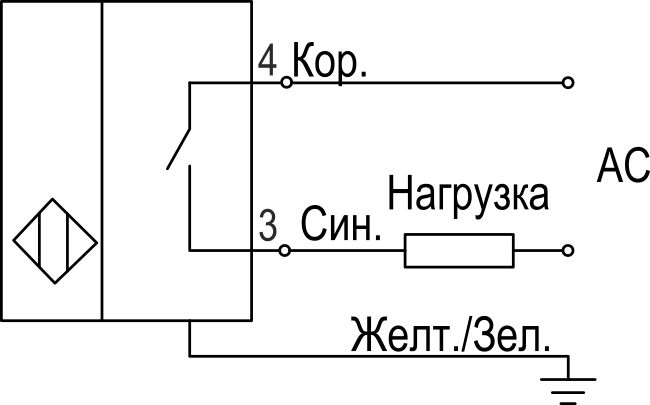
PNP выход датчика. Нагрузка (Load) постоянно подключена к “минусу” (0V), подача дискретной “1” (+V) коммутируется транзистором. НО или НЗ датчик – зависит от схемы управления (Main circuit)
NPN выход датчика. Нагрузка (Load) постоянно подключена к “плюсу” (+V). Здесь активный уровень (дискретный “1”) на выходе датчика – низкий (0V), при этом на нагрузку подается питание через открывшийся транзистор.
Призываю всех не путаться, работа этих схем будет подробно расписана далее.
На схемах ниже показано в принципе то же самое. Акцент уделён на отличия в схемах PNP и NPN выходов.
Схемы подключения NPN и PNP выходов датчиков
На левом рисунке – датчик с выходным транзистором NPN. Коммутируется общий провод, который в данном случае – отрицательный провод источника питания.
Справа – случай с транзистором PNP на выходе. Этот случай – наиболее частый, так как в современной электронике принято отрицательный провод источника питания делать общим, а входы контроллеров и других регистрирующих устройств активировать положительным потенциалом.
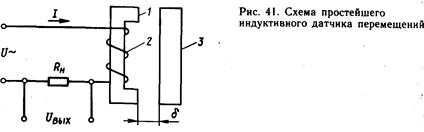
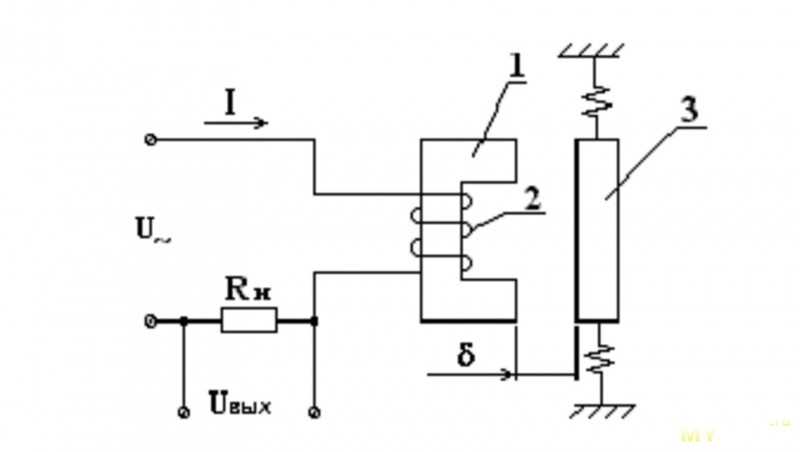
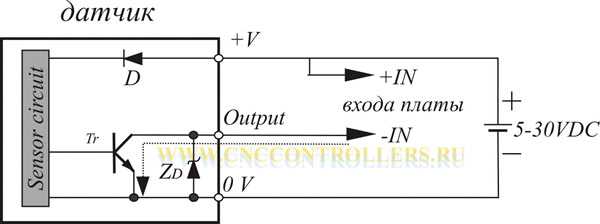
Подключение индуктивного датчика
Не подскажите как подключить датчики к плате? Как я понимаю. поскольку они PNP придется добавить еще оптопары или реле для перехода от PNP к NPN ?
Заранее благодарен.
seaw688 Новичок Сообщения: 5Зарегистрирован: 02 апр 2016, 11:44 Репутация: Настоящее имя: Владислав
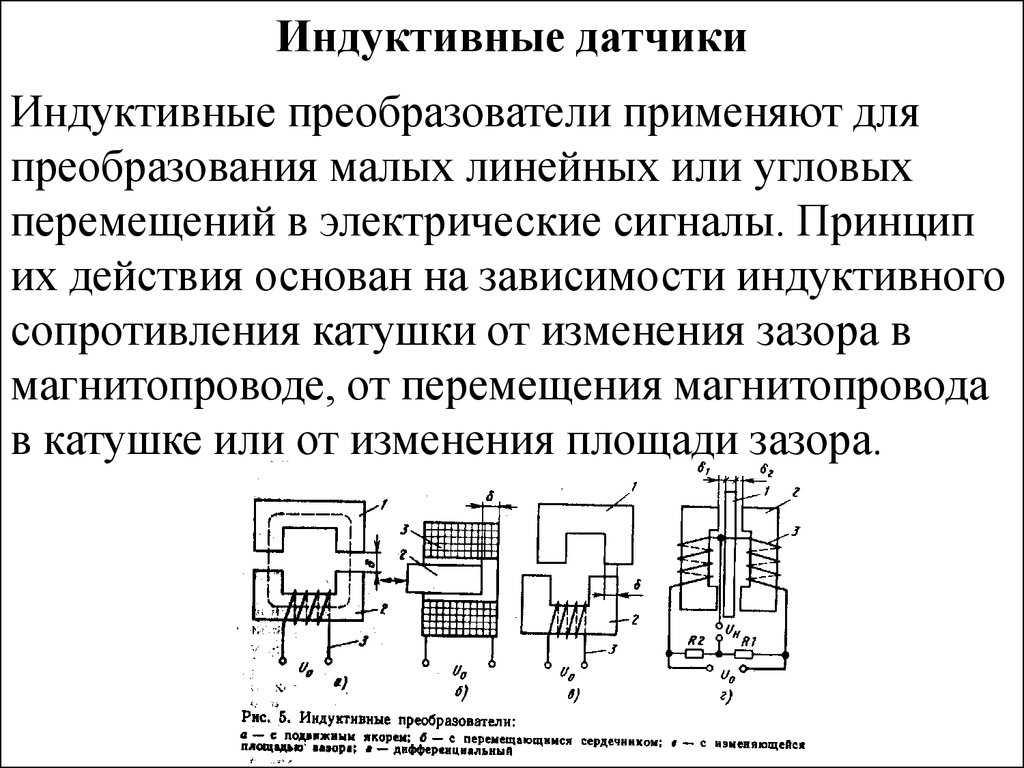
Индуктивные датчики
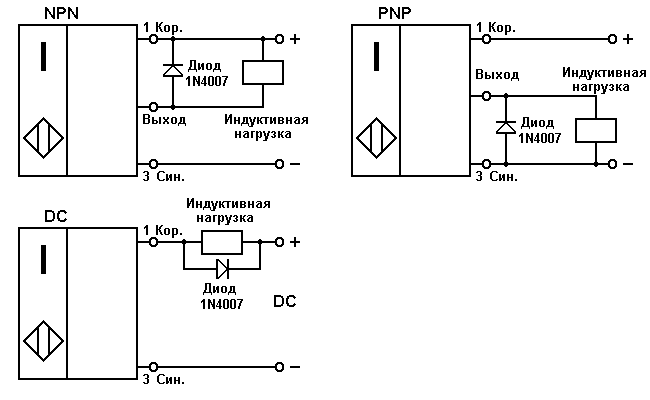
В первой части статьи были описаны возможные варианты выходов датчиков. По подключению датчиков с контактами (релейный выход) проблем возникнуть не должно. А по транзисторным не все так просто. Нужно учитывать много нюансов: полярность, логика работы, напряжение.

Для примера показаны упрощенные схемы подключения датчиков с транзисторным выходом (рис. 1). Нагрузка, как правило, это вход контроллера.
Рис. 1, а — датчик с выходным транзистором NPN. Коммутируется общий провод, который в данном случае — отрицательный провод источника питания. Нагрузка (Load) постоянно подключена к «плюсу» (+V). Здесь активный уровень (дискретный «1») на выходе датчика — низкий (0V), при этом на нагрузку подается питание через открывшийся транзистор.
Рис. 1, б — случай с транзистором PNP на выходе. Нагрузка (Load) постоянно подключена к «минусу» (0V), подача дискретной «1» (+V) коммутируется транзистором. Этот случай — наиболее частый, так как в современной электронике принято отрицательный провод источника питания делать общим (нулевым), а входы контроллеров и других регистрирующих устройств активировать положительным потенциалом.
Напряжение на транзисторном выходе, как правило, определяется напряжением питания, обычно ограниченным узкими пределами. Например, от 18 до 30 В. На это можно посмотреть с другой стороны — сейчас большинство устройств стандартизовано по напряжениям.
Далее от теории перейдем к практическим вопросам.
Как подключить контактор
Особенности подключения светодиодных лент
При подключении контактора сразу нужно определиться с механизмом, который он будет включать. Это может быть двигатель, насос, вентилятор, нагревательные элементы, компрессоров и т. д. Главной особенность контактора, отличающего его от автомата, является отсутствие всякой защиты. Поэтому продумывая цепи включения электрооборудования через контактор обязательно необходимо учесть ограничивающие ток и нагрев элементы. Для ограничения и отключения оборудования при коротких замыканиях и превышающих во много раз номинал нагрузках используются предохранители и автоматы. От длительного незначительно превышения номинальных токов работающего оборудования применяются тепловые реле.
Для того чтобы правильно подключить контактор в схему нужно чётко понимать какие из контактов силовые, а какие из них вспомогательные, то есть блок-контакты. Также нужно посмотреть на номиналы катушки включения. Там должны быть указаны напряжение его тип и величина, а также токи которые через неё протекают для нормальной работы. Во время работы силовые контакты могут погорать, поэтому их необходимо регулярно осматривать и чистить.
Как подключить модульный контактор
Модульный контактор — это разновидность обычных таких же аппаратов для коммутации, только применяются они в основном для включения и отключения распределительных щитков дистанционно. То есть включая его, подаётся питание на группу автоматов, каждый из которых, отвечает за свою определённую цепь. Устанавливается он на DIN — рейке. Может коммутировать как цепи постоянного, так и переменного тока.
Подключение контактора через кнопку
Для подключения контактора через кнопку нужно изучить ниже приложенную схему. Она предназначена для пуска нагрузки, в данном случае двигателя, от контактора катушка которого рассчитана на 220 Вольт переменного напряжения. В зависимости от напряжения стоит продумать её питание. Поэтому при покупке и выборе контактора стоит учесть этот нюанс. Так как если электромагнит будет рассчитан на постоянное напряжение, то понадобится именно такой источник.
При нажатии на кнопку пуск катушка электромагнита контактора получит питание и он включится. Замкнутся силовые контакты, тем самым подастся напряжение на асинхронный двигатель. Также замкнётся блок-контакт контактора К1, который подключен параллельно кнопке стоп. Он называется электриками контакт самоподхвата, так как именно он подаёт питание на включающую катушку после того, как кнопка пуска отпускается. При нажатии на кнопку стоп от электромагнита отключается питание, силовые элементы контактора разрывают цепь и двигатель отключается.
Подключение контактора с тепловым реле
Тепловое реле предназначено для недопускания длительных незначительных токовых перегрузок во время работы электрооборудования, ведь перегрев отрицательно сказывается на состоянии изоляции. Частые превышения температуры и токов приведут к её разрушению, а значит и к короткому замыканию, и выходу из строя дорогостоящего исполнительного элемента.
При повышении тока в цепи статора электродвигателя элементы теплового реле КК будут нагреваться. При достижении заданной температуры, которая может быть регулирована, тепловое реле сработает и его контакты разорвут цепь катушки электромагнита контактора КМ.
В целях безопасности нужно помнить, что работа в цепи контактора должна производиться при полном обесточивании его. При этом автомат питания должен быть заблокирован ключом или запрещающим плакатом от несанкционированного, или ошибочного включения. А также нельзя включать этот аппарат со снятыми дугогасительными камерами, это приведут к короткому замыканию.
Замена датчиков
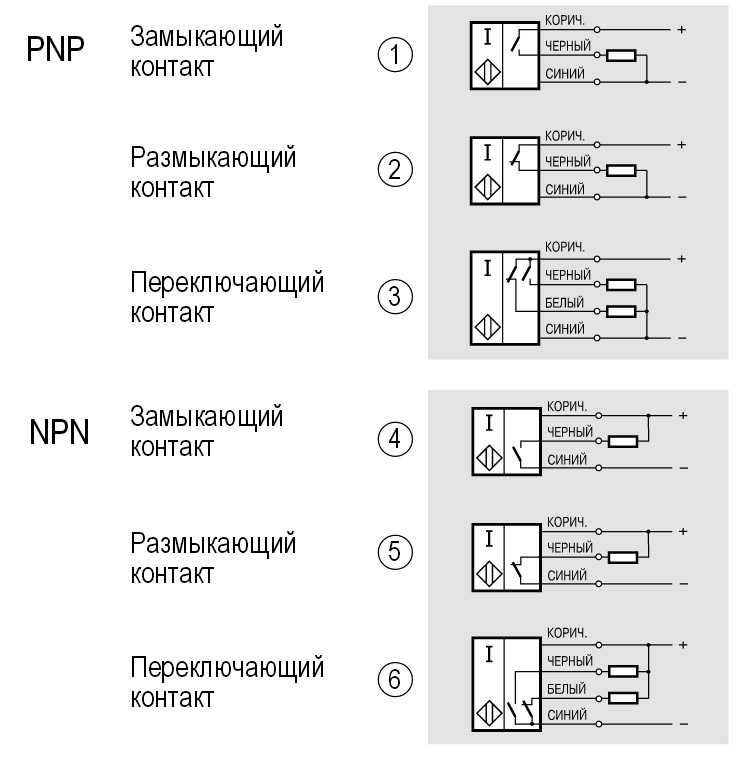
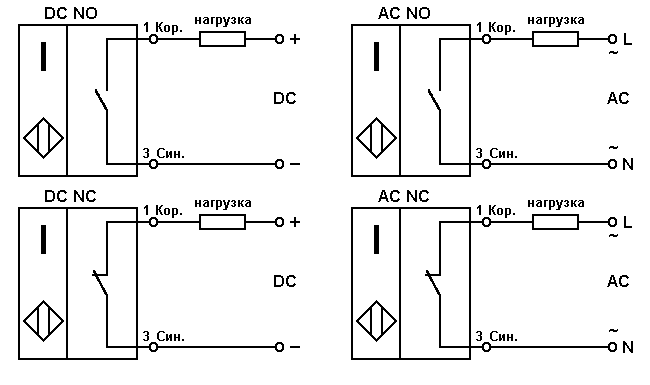
Как я уже писал, есть принципиально 4 вида датчиков с транзисторным выходом, которые подразделяются по внутреннему устройству и схеме включения:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
(adsbygoogle = window.adsbygoogle || []).push({});
Все эти типы датчиков можно заменить друг на друга, т.е. они взаимозаменяемы.

Это реализуется такими способами:
- Переделка устройства инициации — механически меняется конструкция.
- Изменение имеющейся схемы включения датчика.
- Переключение типа выхода датчика (если имеются такие переключатели на корпусе датчика).
- Перепрограммирование программы — изменение активного уровня данного входа, изменение алгоритма программы.
Ниже приведён пример, как можно заменить датчик PNP на NPN, изменив схему подключения:
![]()
PNP-NPN замена. Слева — исходная схема, справа — переделанная.
Понять работу этих схем поможет осознание того факта, что транзистор — это ключевой элемент, который можно представить обычными контактами реле (примеры — ниже, в обозначениях).
Итак, схема слева. Предположим, что тип датчика — НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные «контакты» разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к какому-либо входу. Сопротивление этого входа и является основной нагрузкой.
Если внутренней нагрузки в датчике нет, и коллектор «висит в воздухе», то это называют «схема с открытым коллектором». Эта схема работает ТОЛЬКО с подключенной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Бывают ситуации, когда нужного датчика нет под рукой, а станок должен работать «прям щас».
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 — 10 кОм. Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен — на входе контроллера дискретный «0″, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
Да, не совсем то, что мы хотели. В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов — тахометр, или количество заготовок.
Как добиться полного функционала? Способ 1 — механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 — перепрограммировать вход контроллера чтобы дискретный «0″ был активным состоянием контроллера, а «1″ — пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Сферы использования
Возможная область применения индукционных датчиков настолько велика, что позволяет использовать их не только в быту и автомобилестроении, но и в промышленности с робототехникой, а также медицине.
Медицинские аппараты
Индуктивные датчики широко используются при производстве медицинского оборудования, поскольку магнитные свойства устройства позволяют регистрировать легочную вентиляцию, параметры вибрации, а также снимать баллистокардиограммы.
Бытовая техника
В бытовом плане датчики могут выступать в качестве приспособления контроля водоснабжения, уровня освещения и положения двери (закрыта или открыта), поэтому используются при производстве, к примеру, стиральных машин и другой бытовой техники. Кроме того, устройства применяются в процессе создания элементов «умного дома».
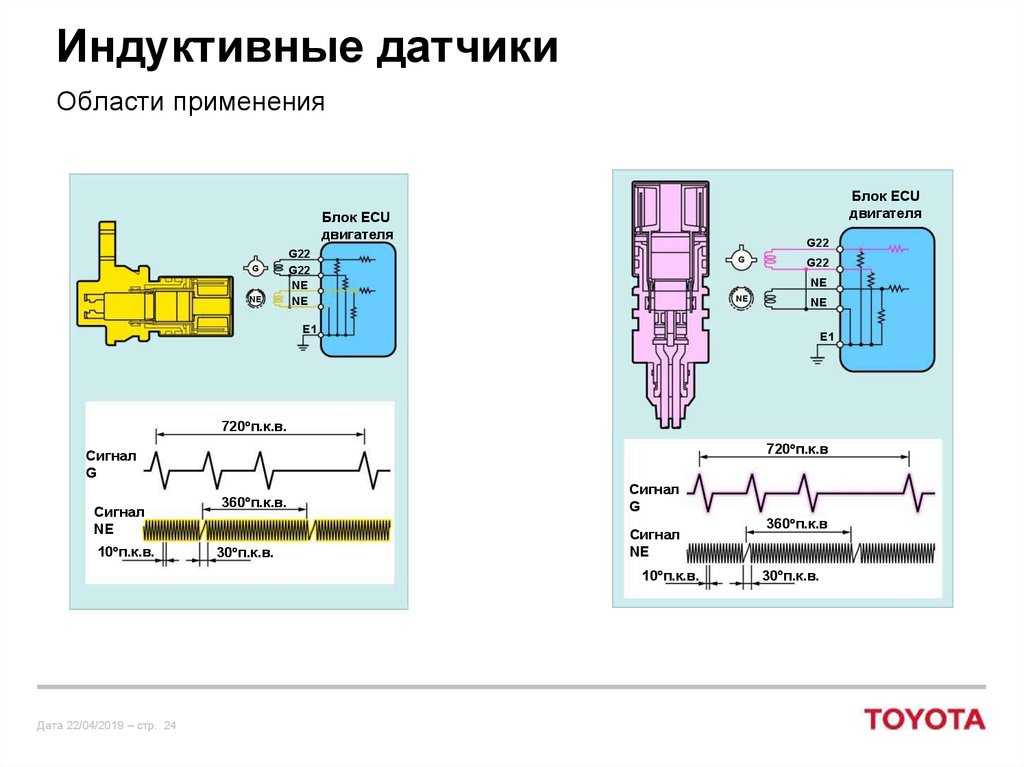
Автомобильная промышленность
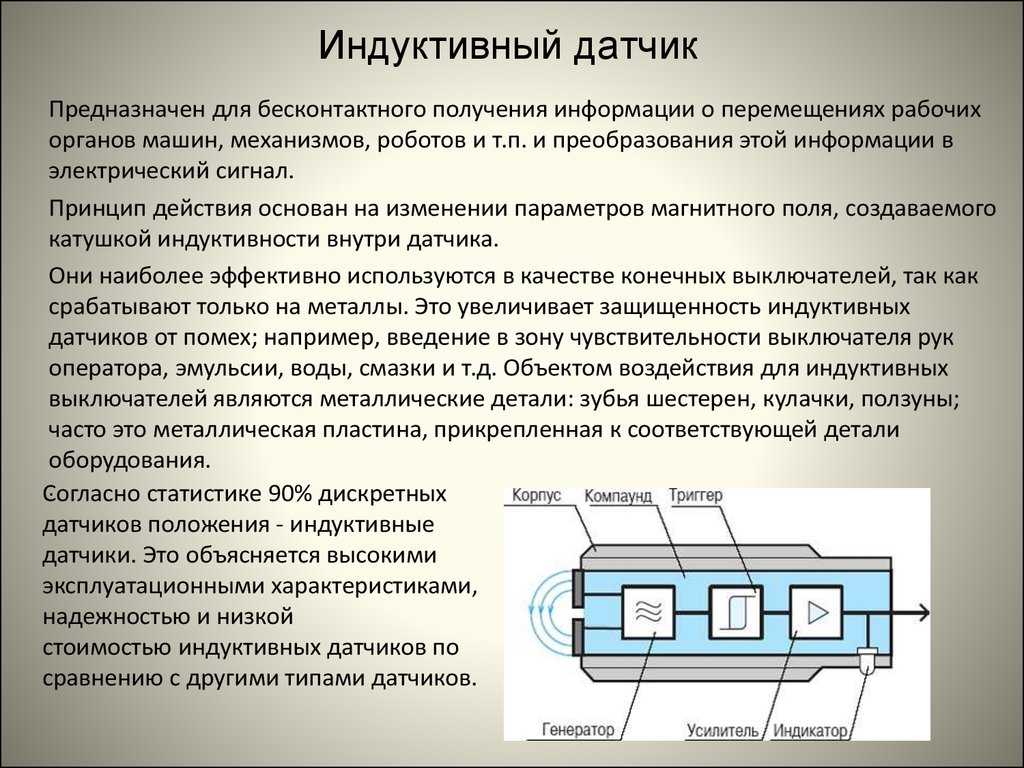
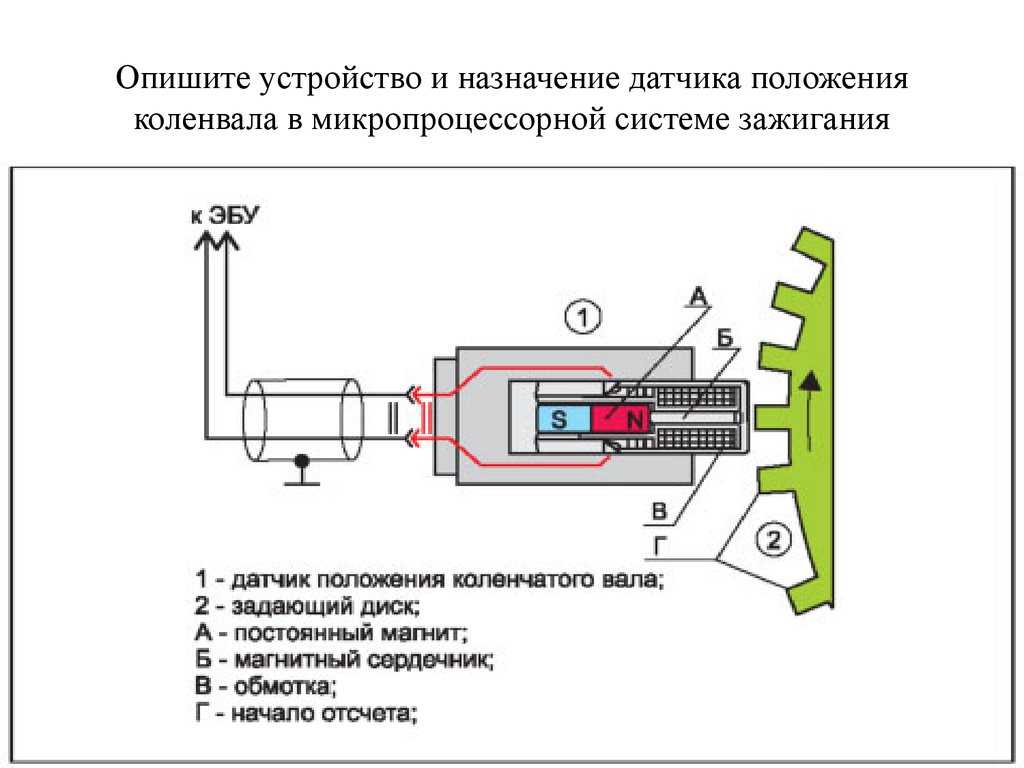
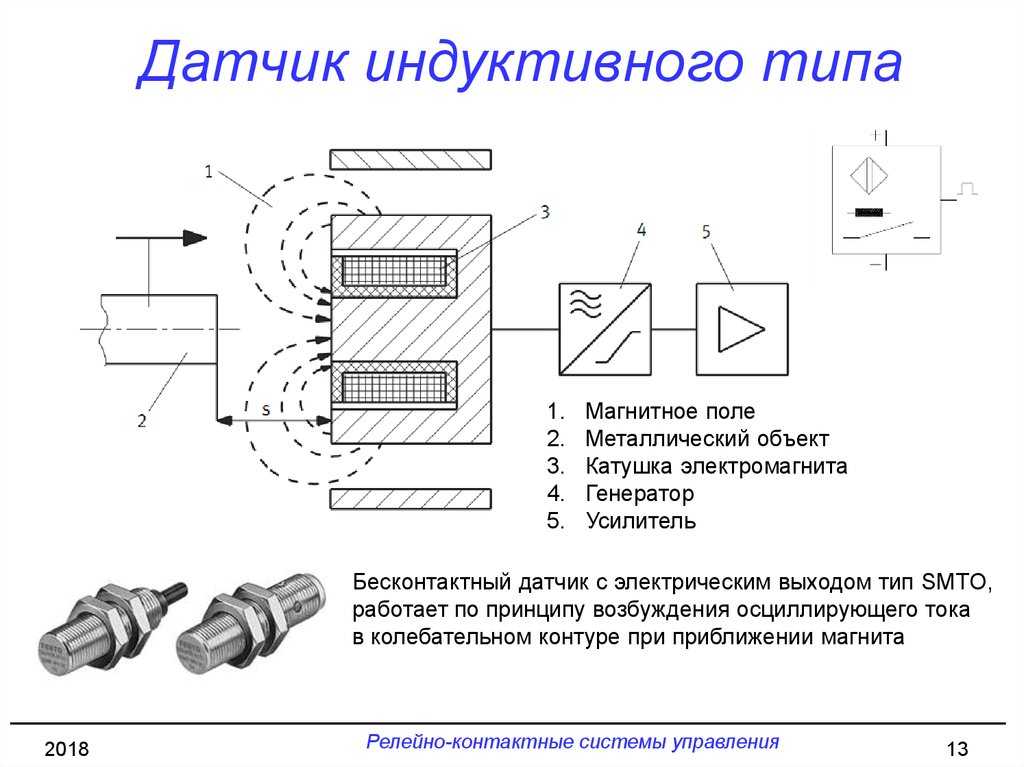
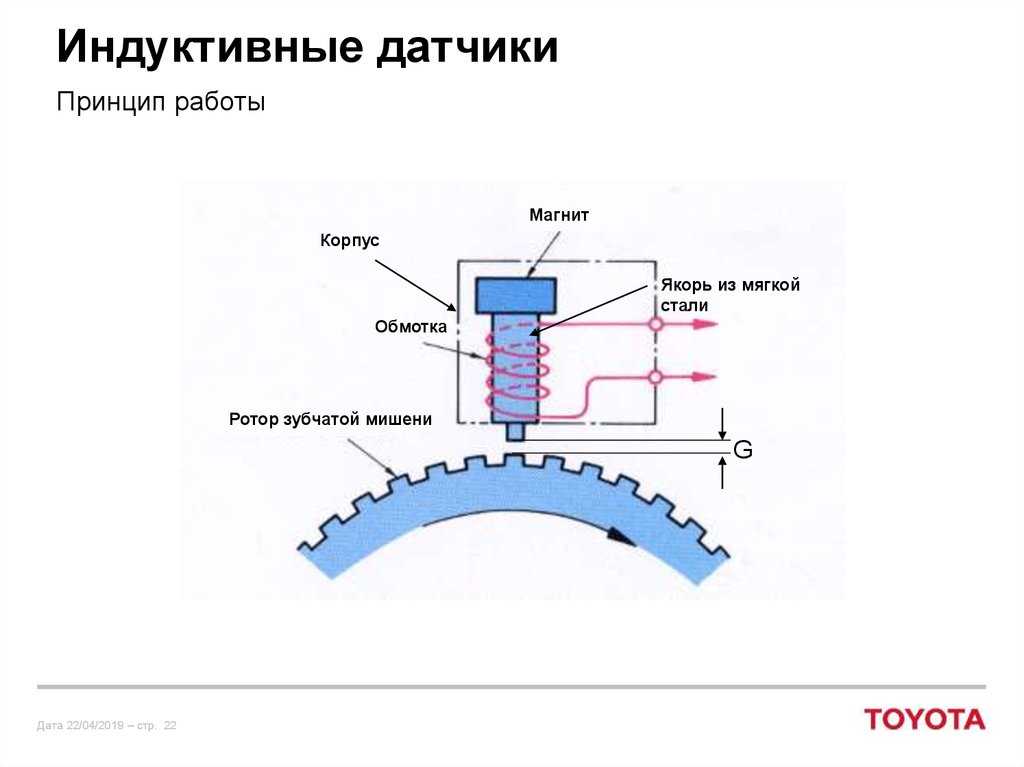
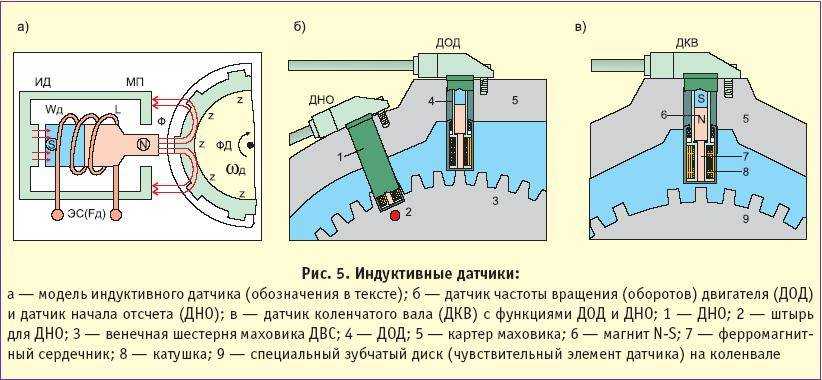
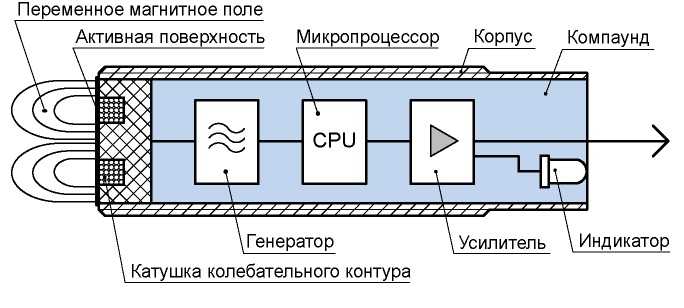
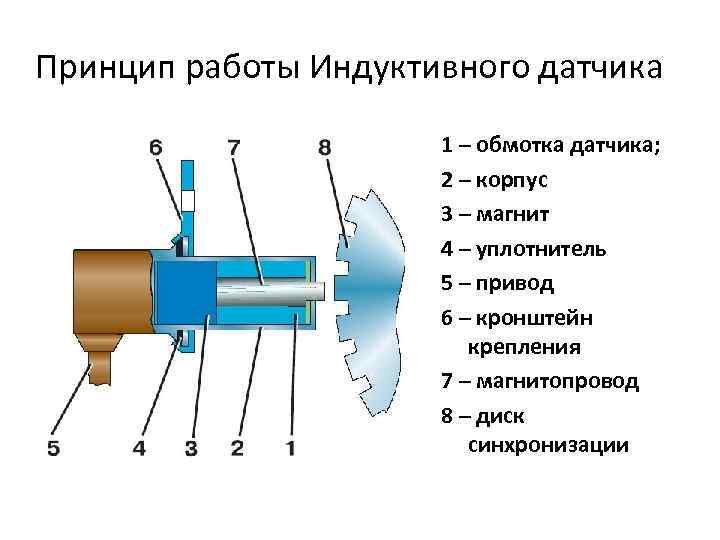
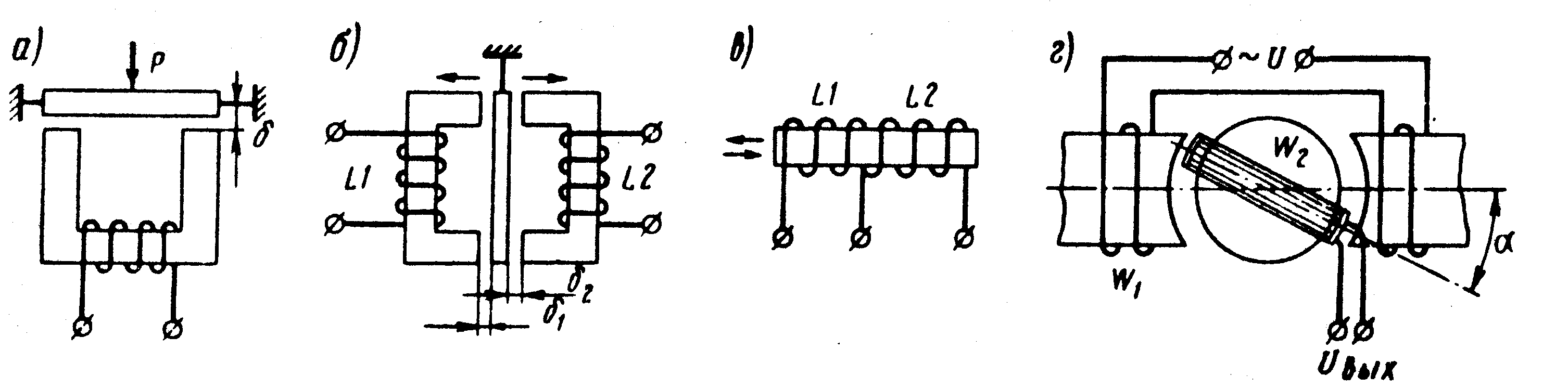
Используется индукционный датчик и в автостроении, выступая в роли контроллера, определяющего положение коленчатого вала. При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
Внимание! Некоторые производители для повышения эффективности стараются изменить конструкцию индукционного датчика, к примеру, используя внешние магниты для его активации
Робототехническое оборудование
В случае с робототехникой, индуктивным датчикам нашли применение в производстве беспилотных аппаратов и промышленных роботов для повышения их чувствительности к препятствиям и способности распознавать объекты, а также устройствах, для которых важна самобалансировка.
Промышленная техника регулирования и измерения
Широко используются в работе систем транспортеров, упаковочных аппаратов и сборочных линий, а еще в составе всех видов станкового оборудования и запорной арматуры. Также индуктивные датчики помогают контролировать мелкие и крупные элементы промышленной техники (зубцы шестеренок, стальные флажки, штампы), объекты производства (металлические изделия, листы металла, крышки) и т.п. Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
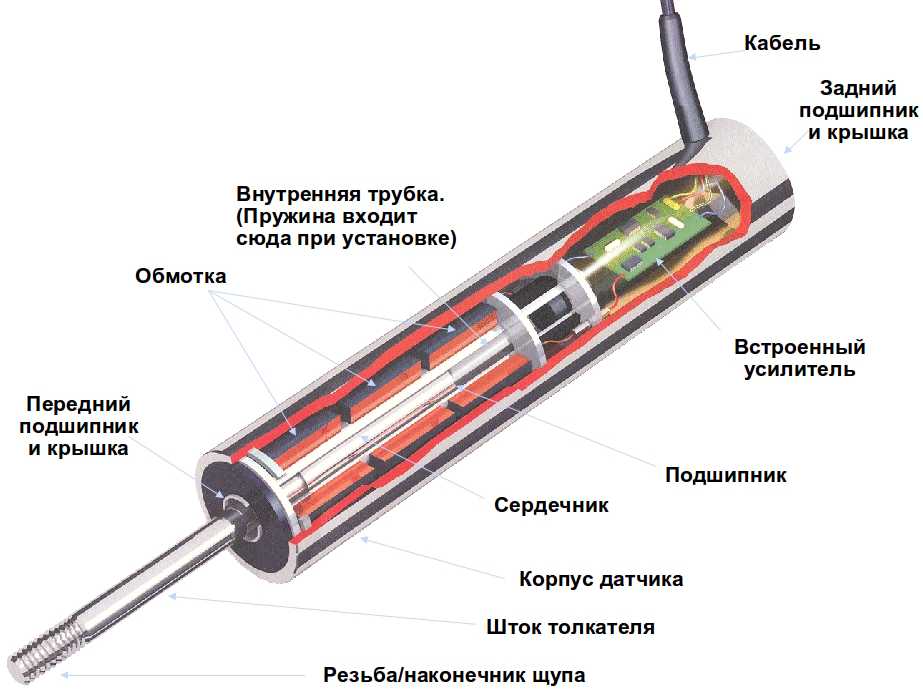
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства. В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов. Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
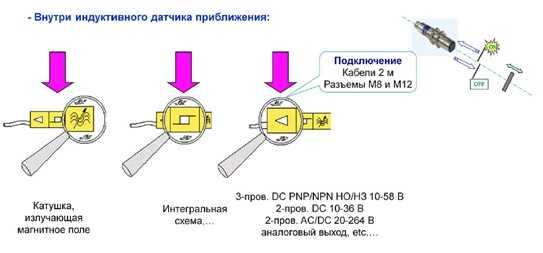
Способ подключения
Существует несколько разновидностей индуктивных датчиков, которые имеют разное количество проводов подключения.
- Двухпроводные. Включаются прямо в цепь токовой нагрузки. Самый простой вариант, но очень капризный. Для него нужен номинальное сопротивление нагрузке. Если он снижается или увеличивается, прибор начинает работать некорректно. При подключении к сети постоянного тока, необходимо соблюдать полярность.
- Трехпроводной. Это самые распространенные индукционные датчики, в которых два провода подключаются к напряжению, один к нагрузке.
- Четырех-, пятипроводные. В них два провода подключаются к нагрузке. Пятый провод – это возможность выбора режима работы.
А что там свежего в группе ВК СамЭлектрик.ру?
Подписывайся, и читай статью дальше:
Итак, схема слева. Предположим, что тип датчика – НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные “контакты” разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к входу контроллера или другой нагрузке. Сопротивление этого входа и является основной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 – 10 кОм. Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов – тахометр, или количество заготовок.
Да, не совсем то, что мы хотели, и схемы взаимозаменяемости npn и pnp датчиков не всегда приемлемы.
Как добиться полного функционала? Способ 1 – механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 – перепрограммировать вход контроллера чтобы дискретный “0” был активным состоянием контроллера, а “1” – пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.